Nissan Altima (L32) 2007-2012 Service Manual: BCM (Body control module)
Reference Value
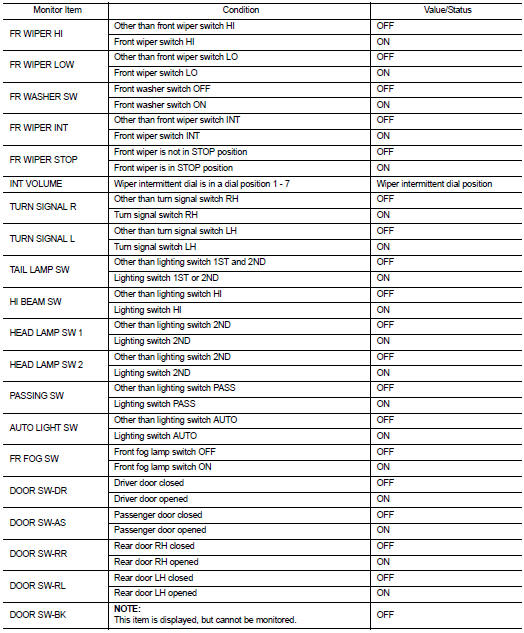
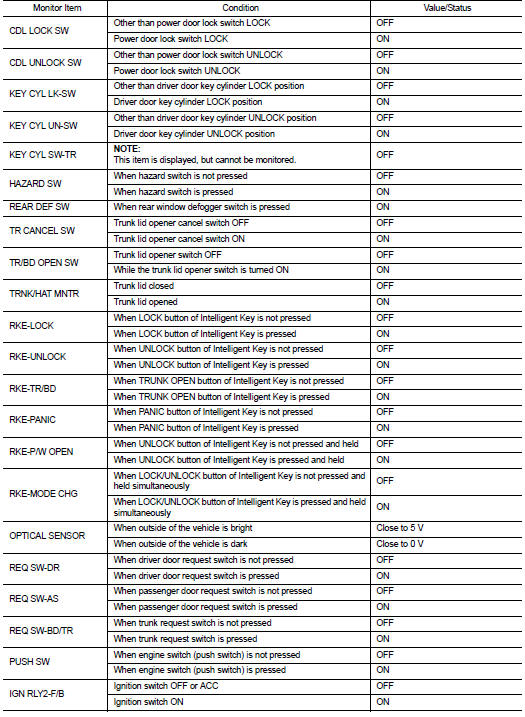
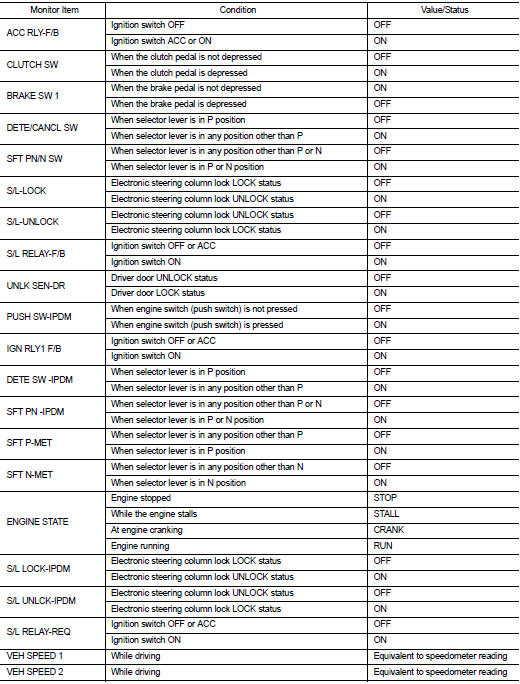
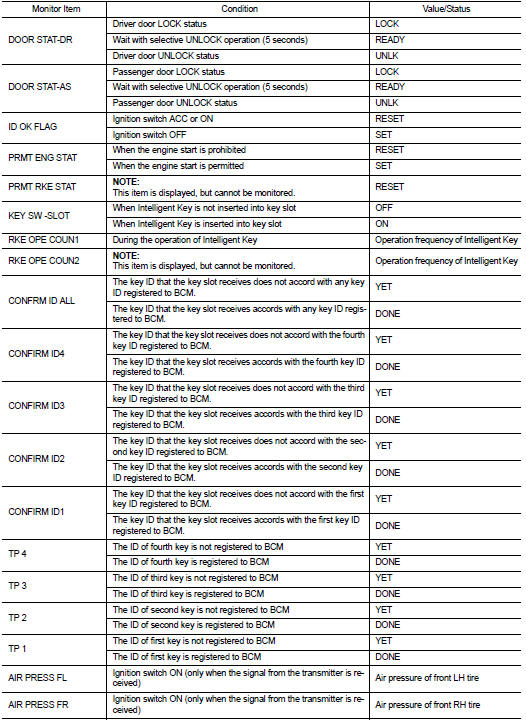
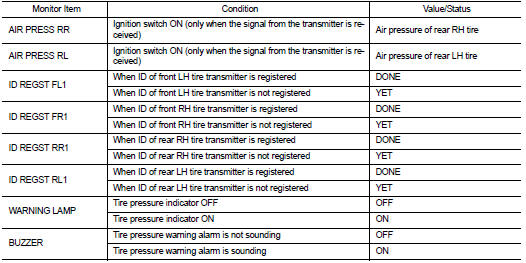
VALUES ON THE DIAGNOSIS TOOL
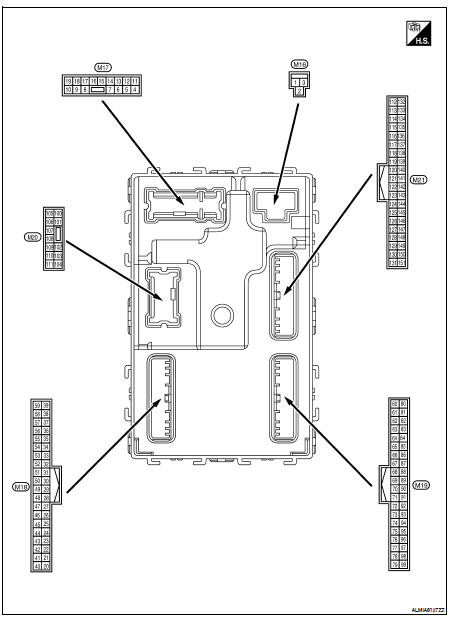
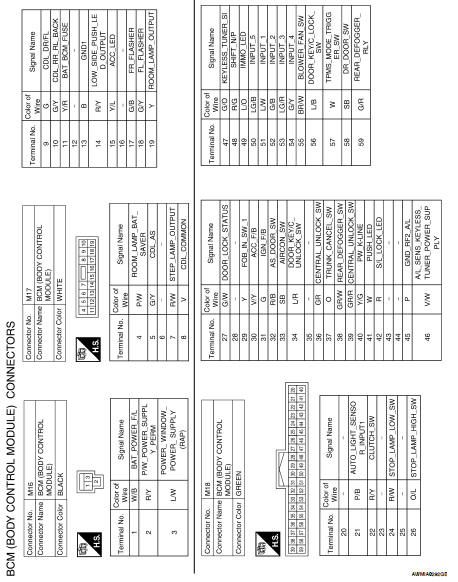
Terminal Layout
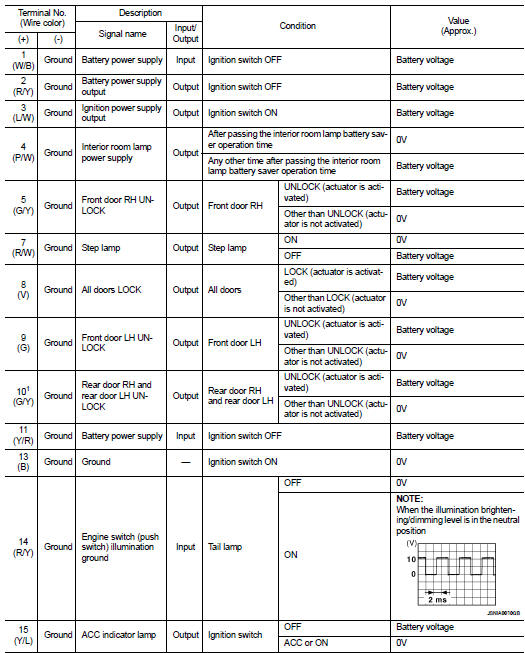
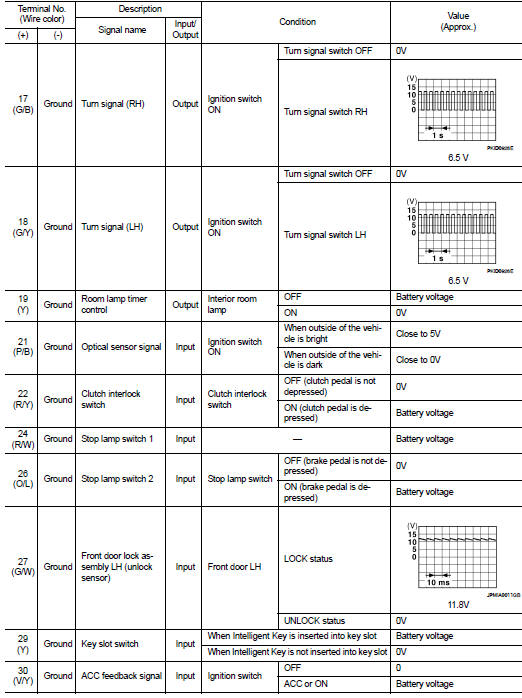
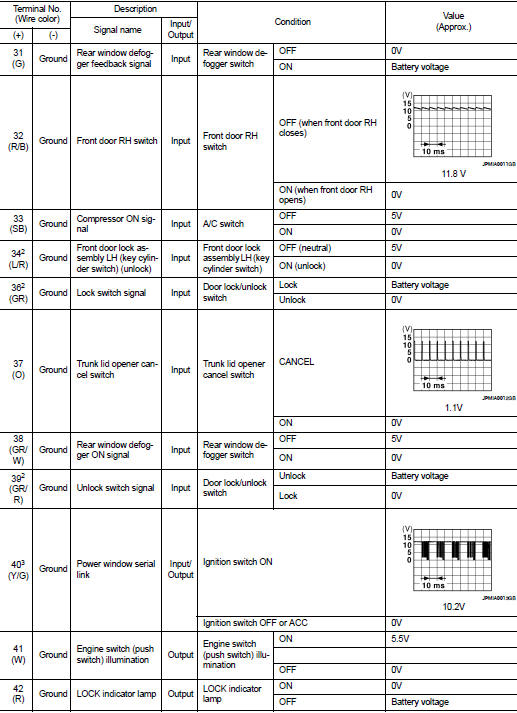
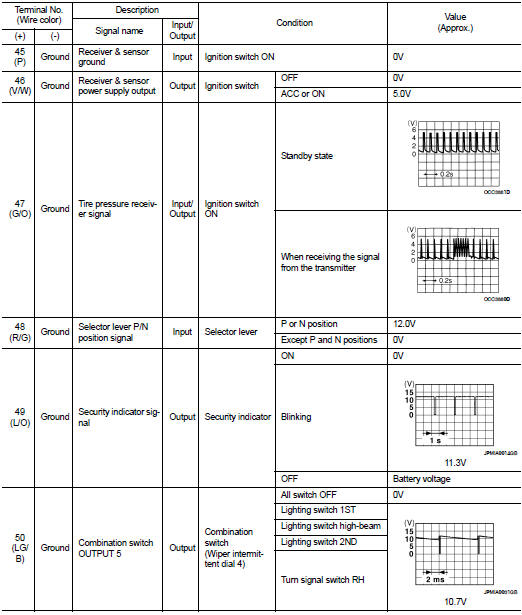
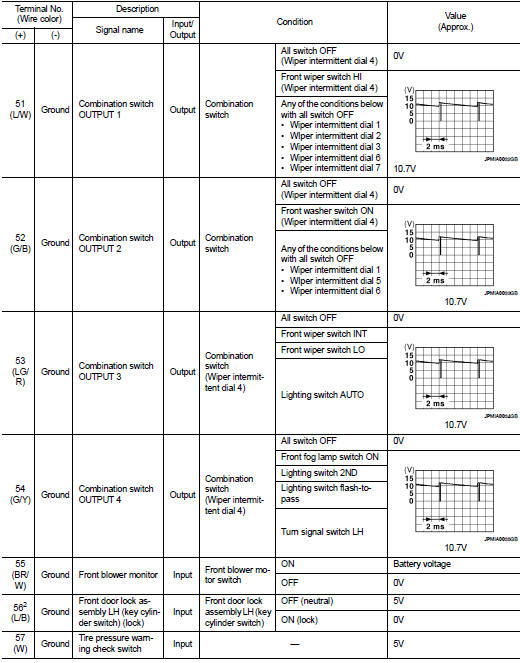
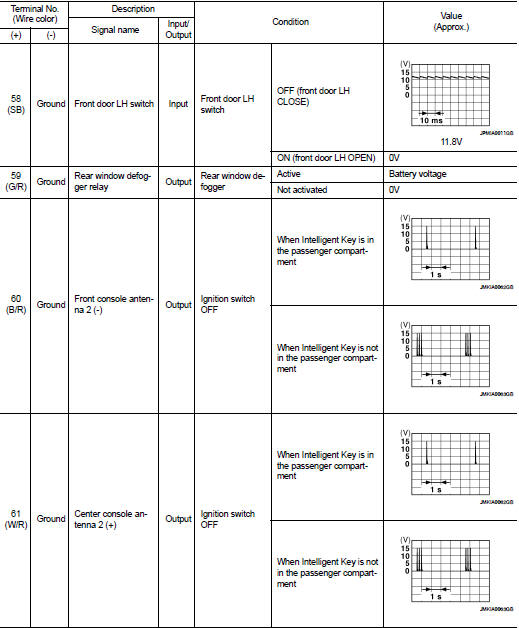
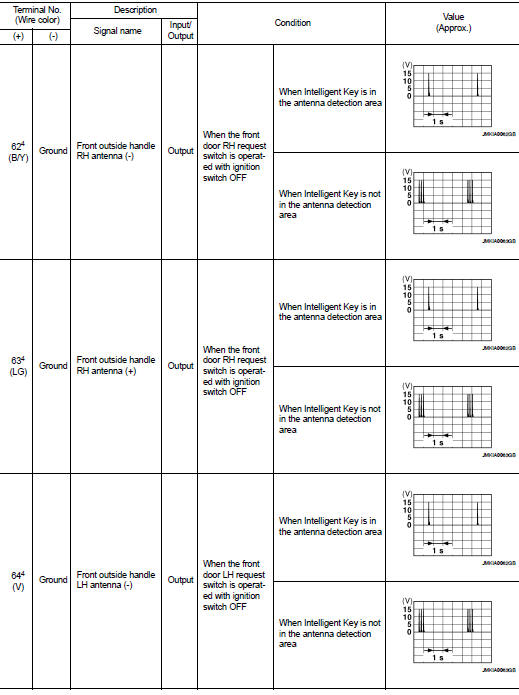
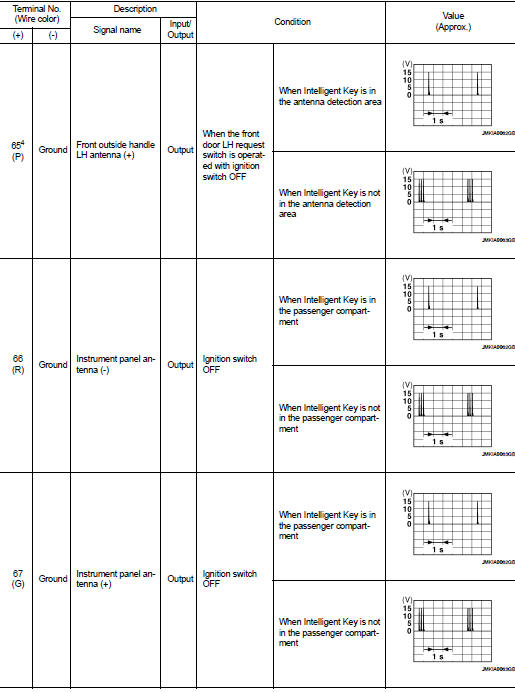
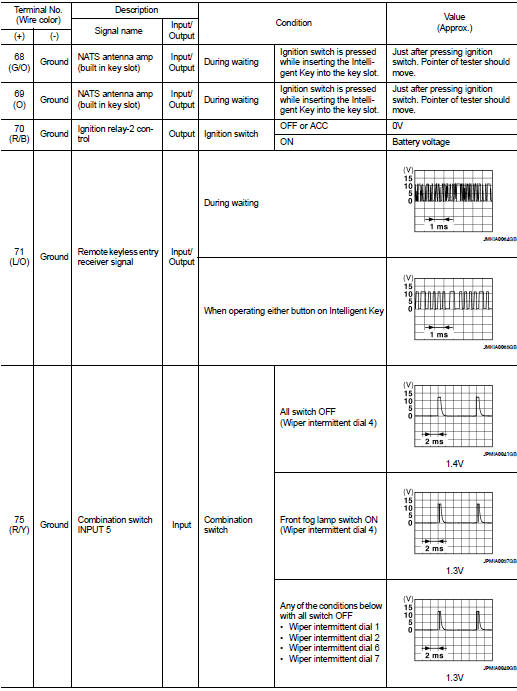
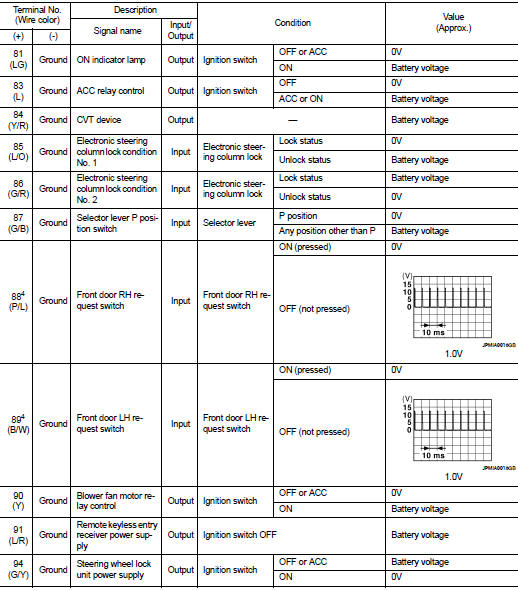
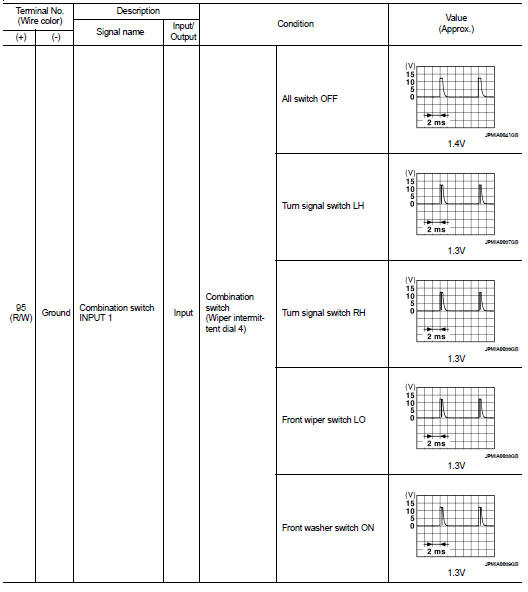
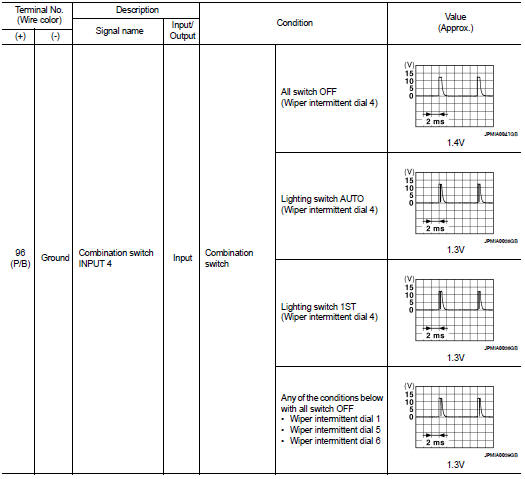
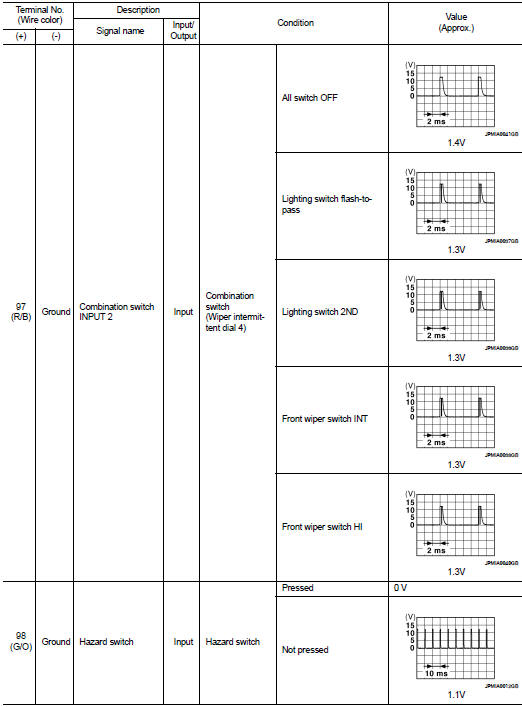
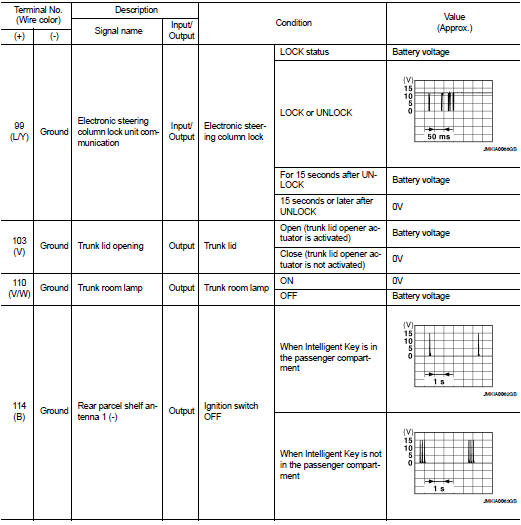
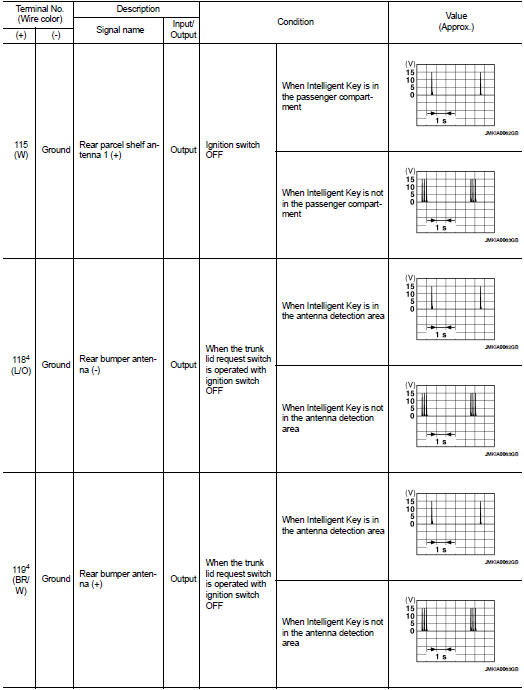
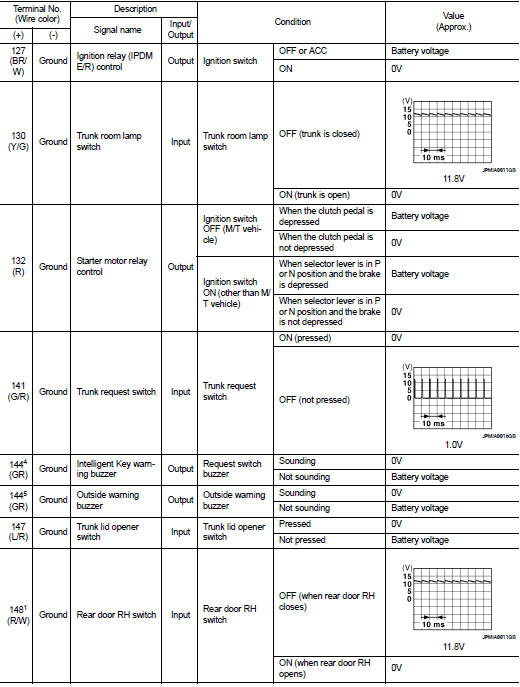
Physical Values

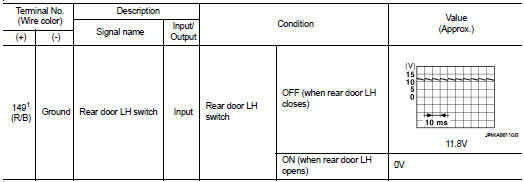
1: Sedan only
2: With LH front window anti-pinch
3: With LH and RH front window anti-pinch
4: With Intelligent Key
5: Without Intelligent Key
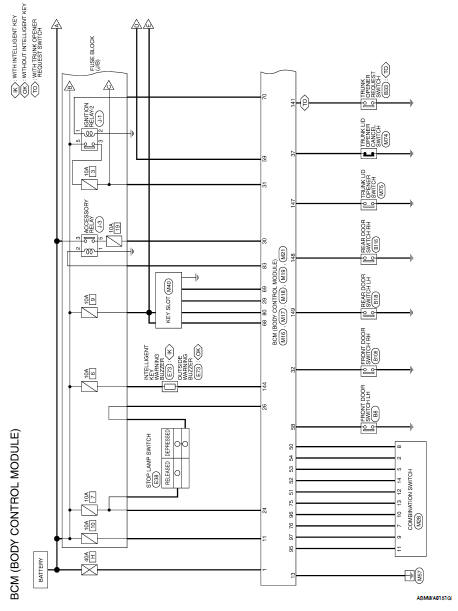
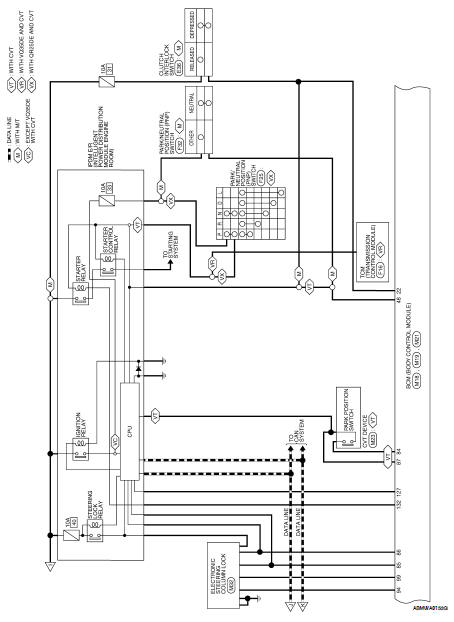
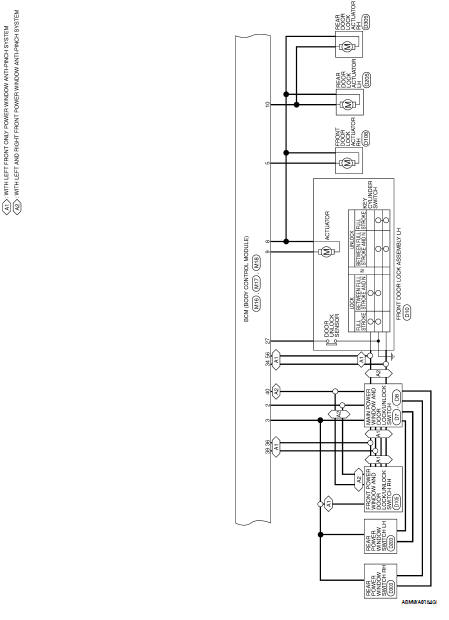
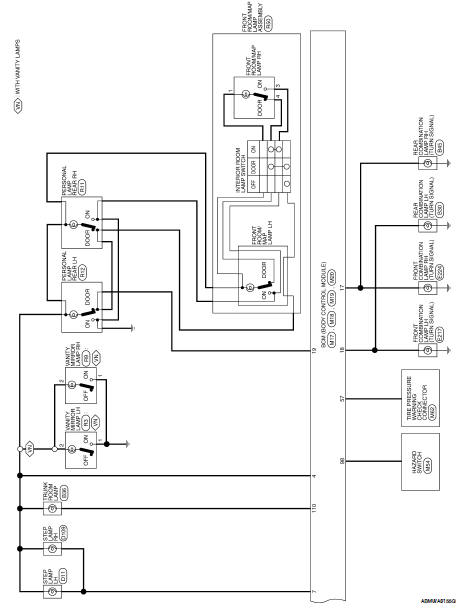
Wiring Diagram-Coupe
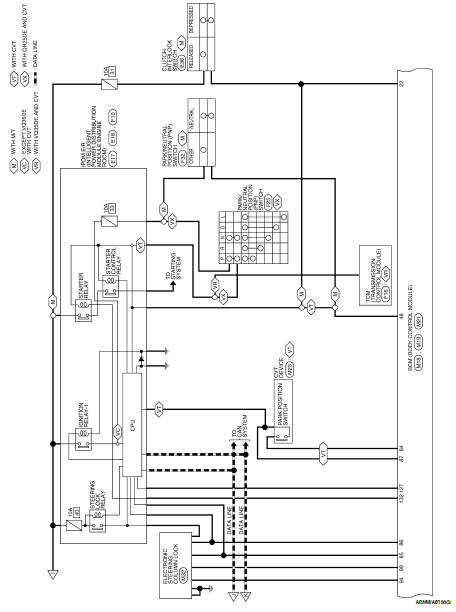
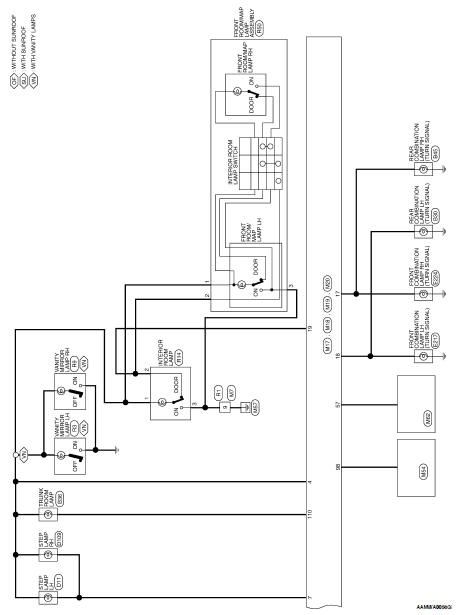

Wiring Diagram-Sedan
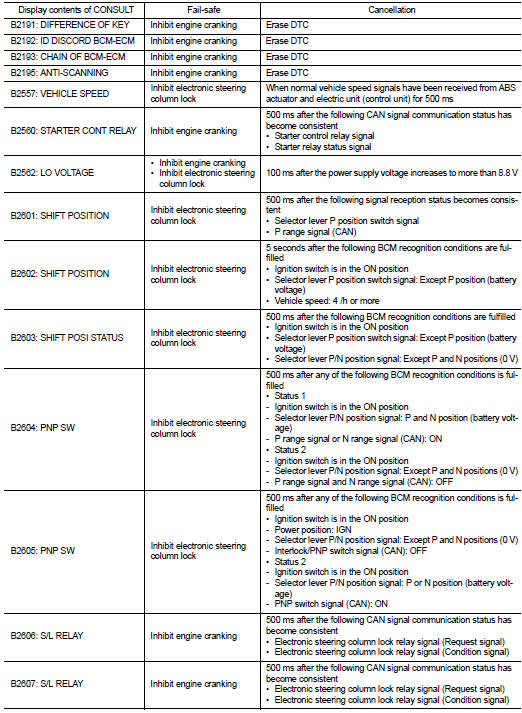
Fail Safe

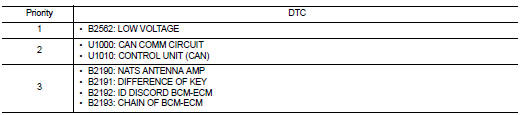
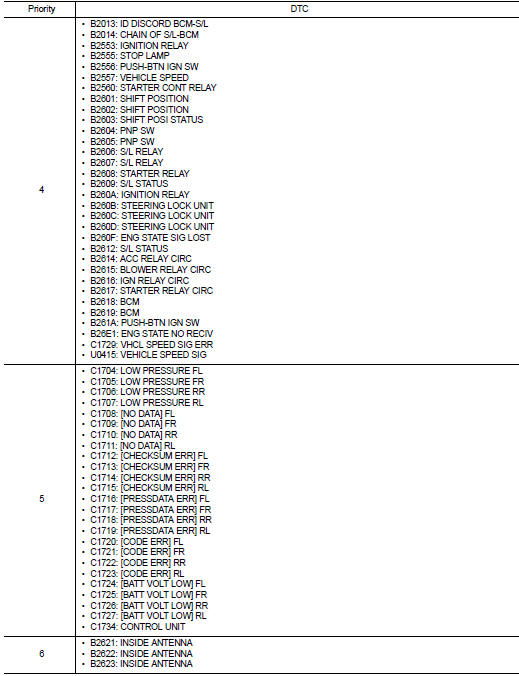
DTC Inspection Priority Chart
If some DTCs are displayed at the same time, perform inspections one by one based on the following priority chart.
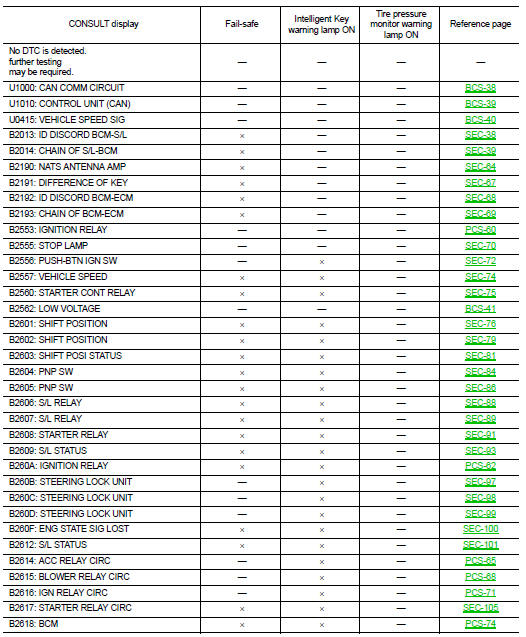
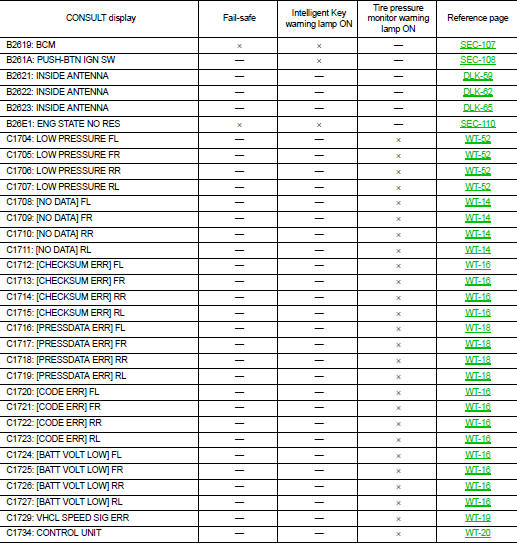
DTC Index
NOTE:
Details of time display
• CRNT: Displays when there is a malfunction now or after returning to the normal condition until turning ignition switch OFF → ON again.
• 1 - 39: Displayed if any previous malfunction is present when current condition is normal. It increases like 1 → 2 → 3...38 → 39 after returning to the normal condition whenever ignition switch OFF → ON. The counter remains at 39 even if the number of cycles exceeds it. It is counted from 1 again when turning ignition switch OFF → ON after returning to the normal condition if the malfunction is detected again.
 Combination meter
Combination meter Symptom diagnosis
Symptom diagnosis